HAL: A Hill-Climbing, Maneuverable Robot
As a part of MIT's Design and Manufacturing class, I designed and built HAL, a hill-climbing, maneuverable robot. The class is structured around a competition at the end of the year, during which each student's robot competes to earn the most points by completing discrete tasks on a customized course. This year, the theme was the American Revolution, so I decided to focus on a robot that would climb up a 60-degree incline, corral cannon balls, and push them into a series of holes on the bridge.
I iterated through several different methods of climbing the hill, settling on a hooked arm that took advantage of the slim silver rail running alongside the slope. I added a simple pusher to the front of the robot, finding that a U-shaped piece of metal worked far better than any more complicated design.
HAL reliably completely both tasks and scored points during testing, and it won its round of the final competition.
Press: http://news.mit.edu/2016/course-2007-competition-robots-battle-revolutionary-style-0506
Individual Project
Spring 2016
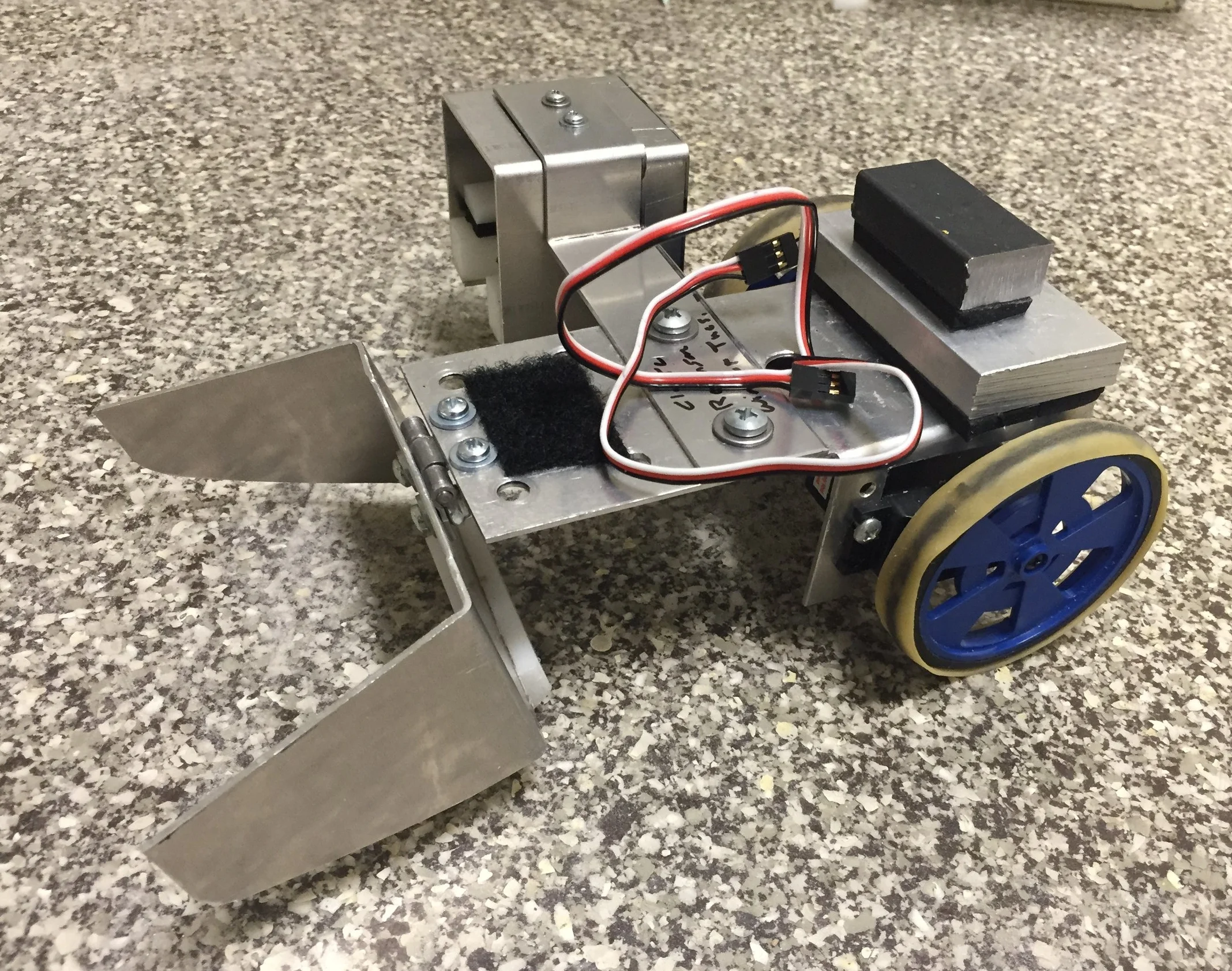
HAL in its final iteration

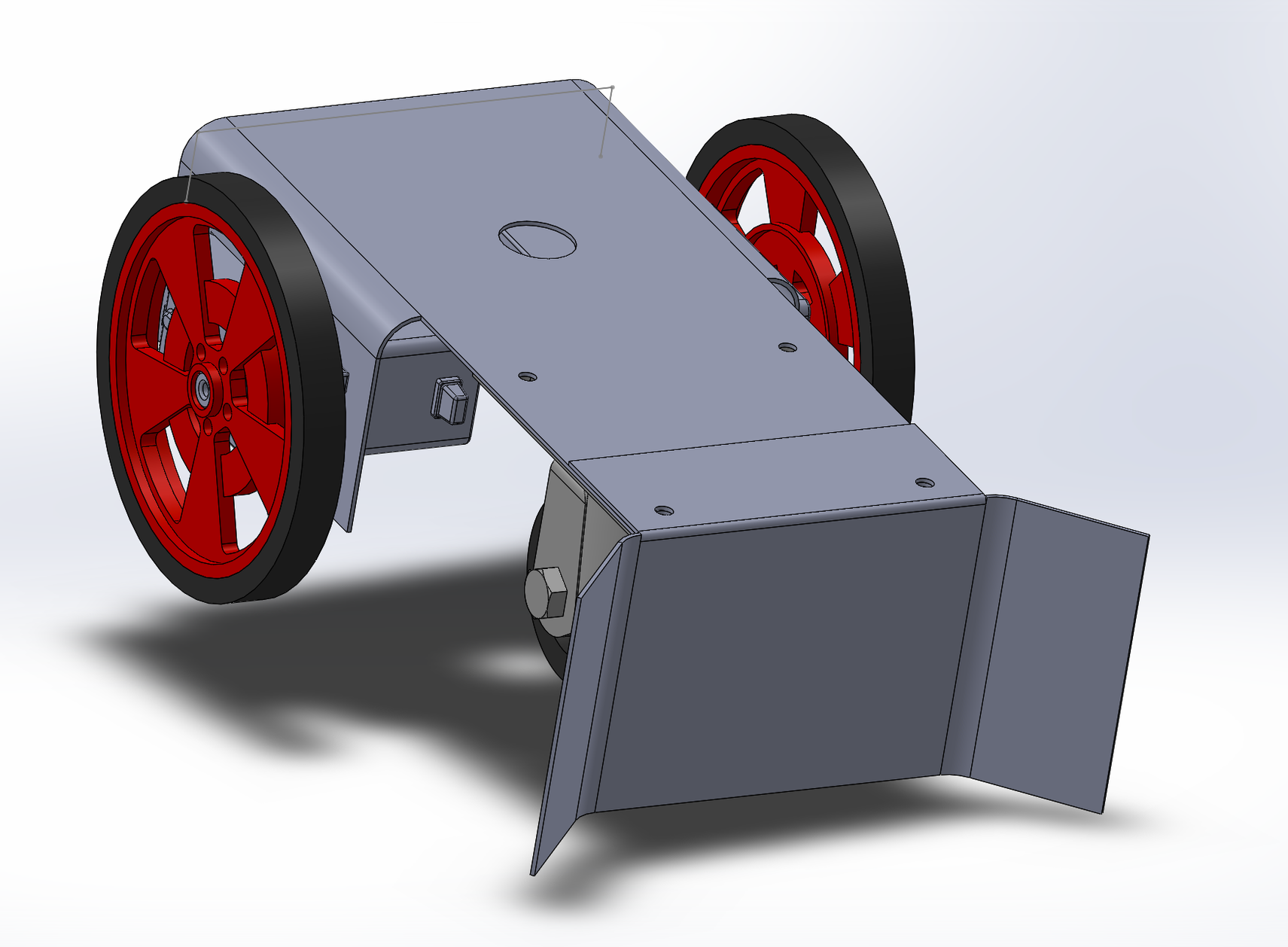

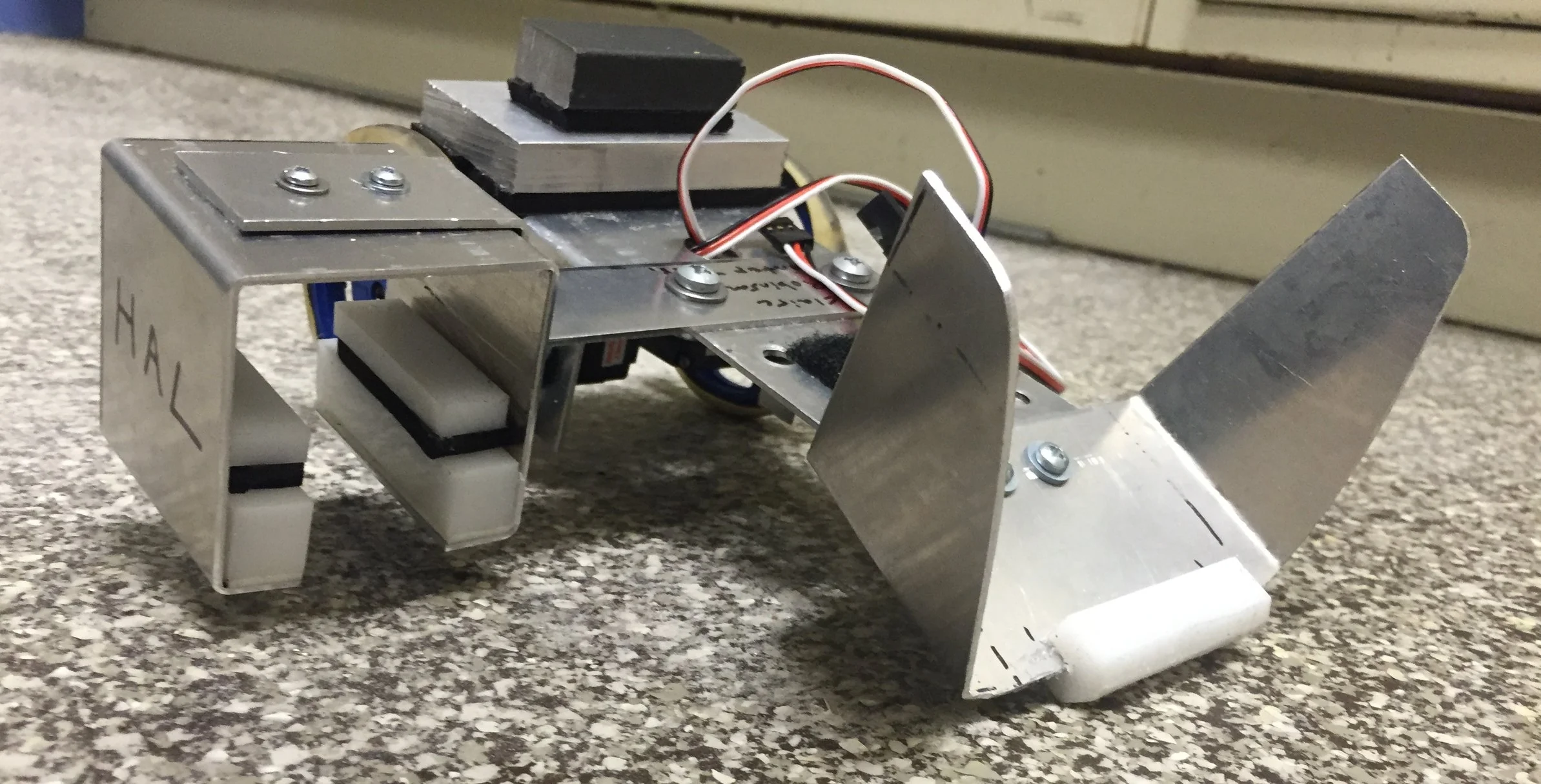
Image of course courtesy of Amos Winter